Software
The Mechanical led RoboSub team is working in cooperation with an Electrical engineering led RoboSub team which is working with more of the programming realated tasks. Their website can be found here.
Object Detection and Orientation
November 17th, 2015
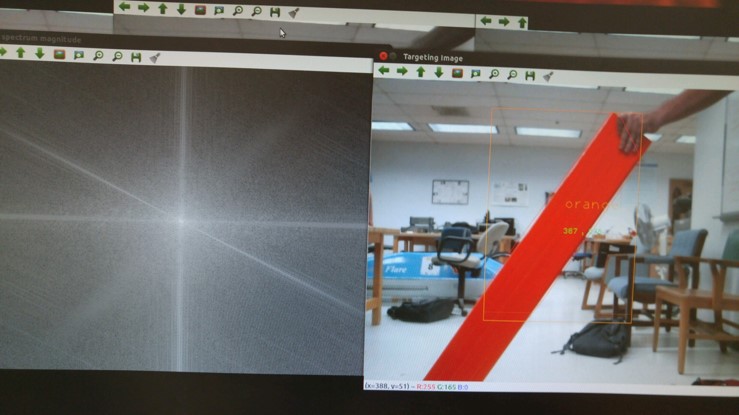
Working with the ECE led team the object detection software was optimized using a Fourier transform to enable the sub to know its relative angle to an object in the water. Seen in the figure above this allows the sub to orient itself with a line at the pool bottom.