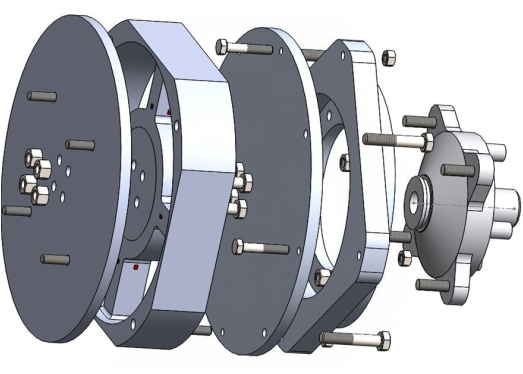
 CAD design of the Wheel Torque Sensor.
CAD design of the Wheel Torque Sensor.
As technology advances, increasingly more systems
are becoming automated, requiring less and less human interaction and input.
One of the more ambitious goals of this automation is to have fully autonomous
vehicles. DARPA hosts many competitions with the sole purpose of creating such
vehicles and furthering their progression into everyday life. Many
of the advances tested and pioneered at these competitions have already made it
into the mainstream markets. Systems such as adaptive cruise control, and lane
departure systems are already offered as features on many vehicles, and
capabilities will increase as other systems such as networked collision
avoidance are perfected.One of such systems is the Center for
Intelligent Systems Control and Robotics’ (CISCOR) Gas Operated Land
Intelligent All Terrain Hub (GOLIATH), shown in the header above. GOLIATH started out
as a 2012 Polaris Sportsman 550 all-terrain vehicle. Previous projects with
this vehicle led to the addition of actuators on the throttle, brake, steering
and shifter. Last year, additional sensors and computer systems were added and
interfaced together to give GOLIATH the ability to work autonomously.The goal this year is to
incorporate a wheel force/torque sensor for the vehicle.
incorporate a wheel force/torque sensor for the vehicle.
