
Built by Engineers,
Fueled by Innovation.
The Competition
Background
The Seafarer Chapter of Association for Unmanned Vehicle Systems International (AUVSI) is holding the 2016 Student Unmanned Aerial System (SUAS) competition. It challenges students to design a system capable of completing a specific and autonomous aerial operation. The goal is to stimulate and foster interest in innovation and careers in the aerospace industry.
Official Rules: 2015 AUVSI Student Unmanned Air Systems Rules
Objectives
- Autonomous flight
- Vertical Take-Off and Landing (VTOL)
- Automatic Target Detection, Localization, Classification
- Sense-Detect-and-Avoid
- Payload Delivery
Constraints
- Minimum Communication speed of 10Hz
- Flight altitude between 100-400 MSL-
- Maximum Speed of 115mph
- Maximum weight of 55lbs
- Minimum payload weight of 500g
Technical Approach
Overview
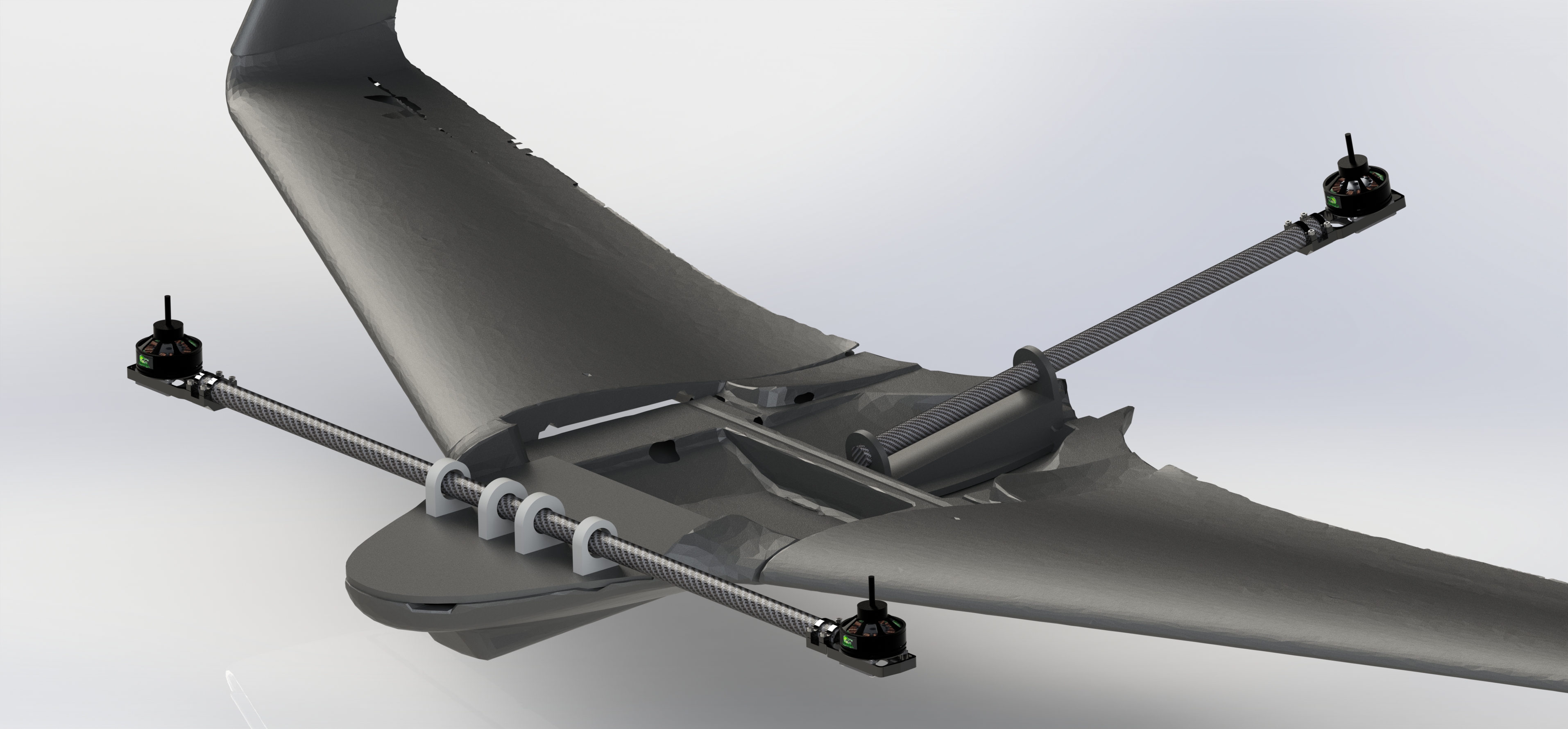
The overall approach to this design is to integrate a Tri-Copter frame into a flying wing fuselage. Through the use of this innovative aircraft design, we have created a Autonomous Aircraft capable of successfully transitioning from vertical (multi-rotor) flight to horizontal (fixed wing) flight. The vertical flight allows for precise maneuvering and landing. This can be very advantageous for flight space, payload delivery, and photography/videography. Whereas, the horizontal flight allows for more efficiency.


The Skyhawk
In comparison to the designs of
previous years
and
other concepts, the Skyhawk will:
● Be more durable
● Have easily replaceable parts
● Have larger internal capacity for hardware
● Have lower power consumption
● Be lighter
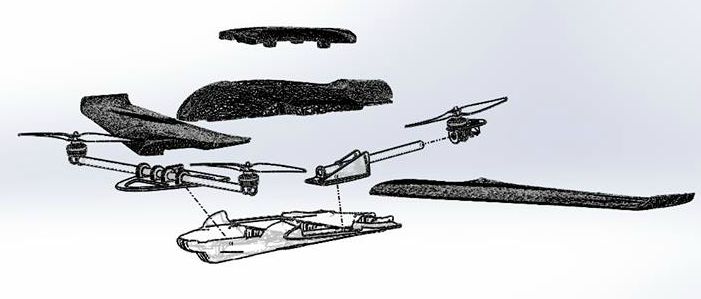
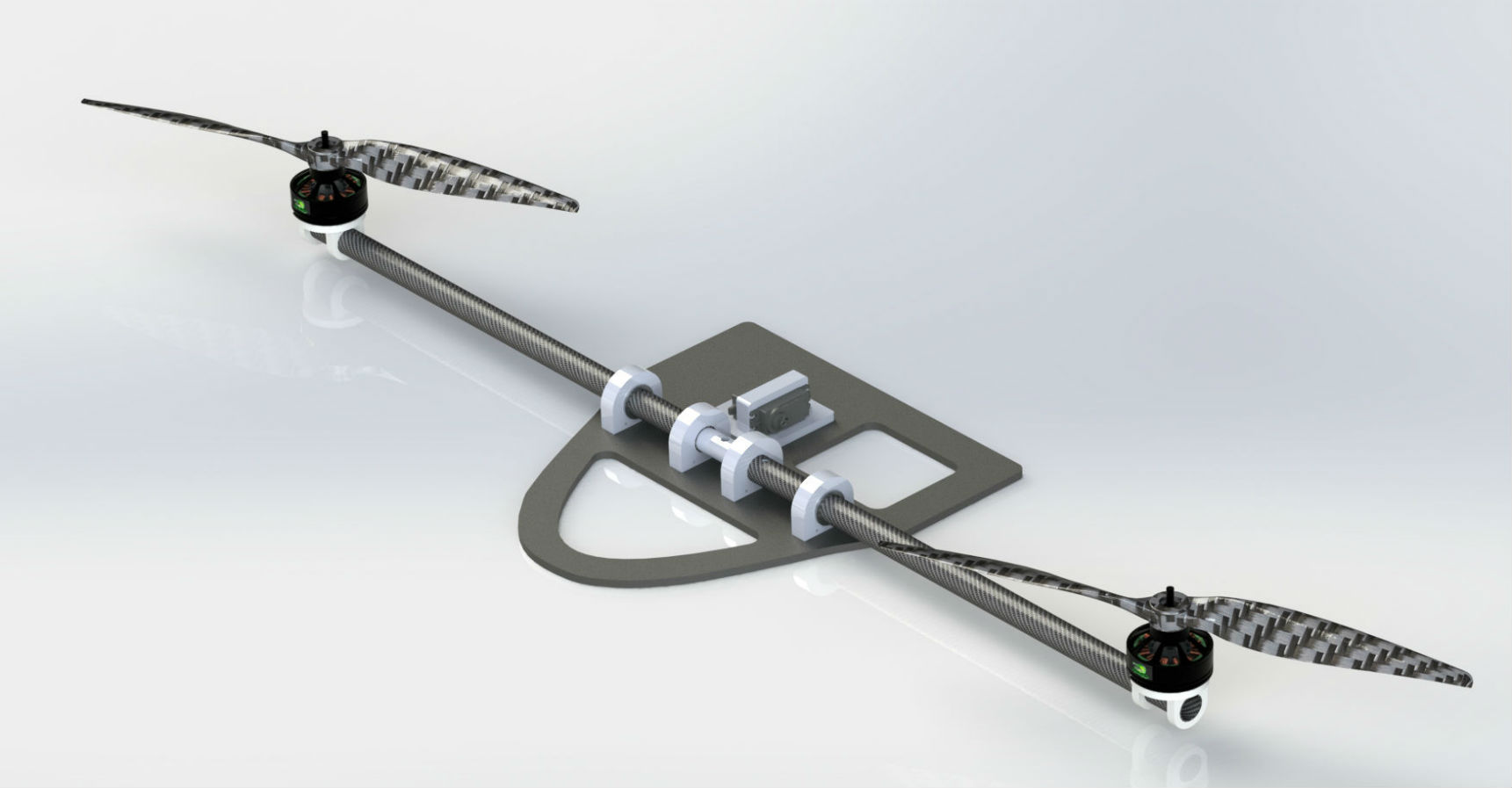
System Integration
● Flying Wing Fuselage
● ABS/Carbon fiber integrated Tri-Copter Frame
● Tilt-Rotor mechanism for flight transition
● Axial rotating rear motor mount for yaw control
● Multi-level rear boom mount for forward pitch of frame in transitional flight
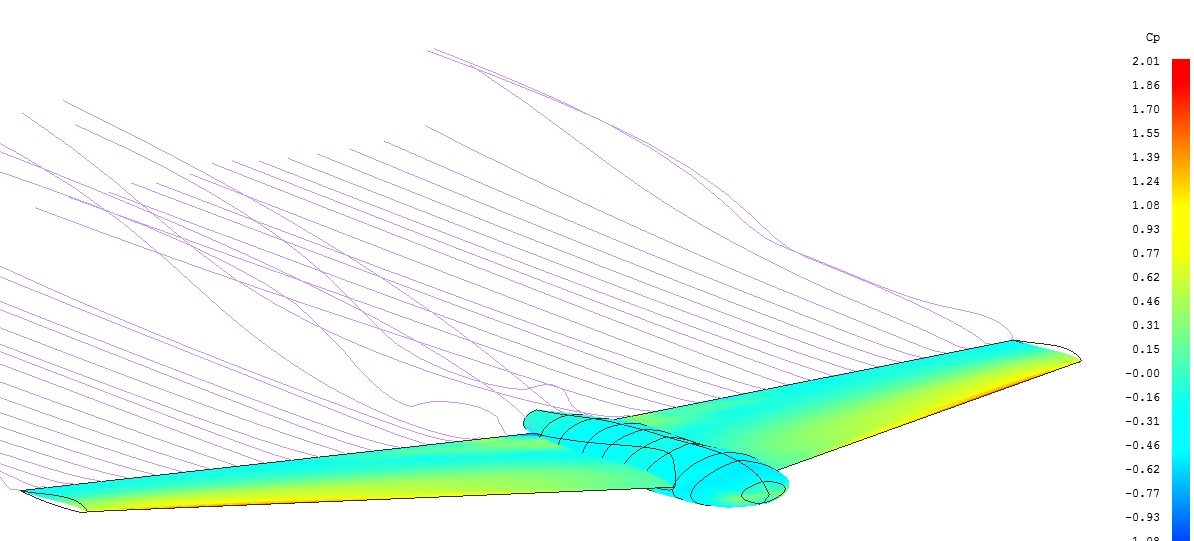
Aerodynamics
● Reverse Engineered consumer avaliable fuselage and compared to known database
● Conducted Computational Fluid Dynamics
● Analyzed fuselage/airfoil for proper lift and drag characteristics
● Back calculated nessasary horizontal speed (12.5 m/s) for sufficient lift
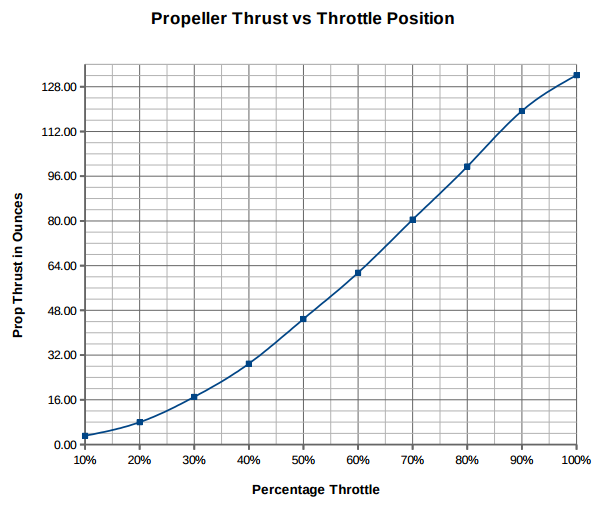
Propulsion
● Designed for an estimated All-Up-Weight of 5.5kg (12.1lbs)
● Selected proper motor/propeller pair to operate nominally at 60% throttle and provided sufficient
thrust for twice the estimated weight for safety
● Cobra 420kv 780 Watts Electric Brushless motors
● RCTimer 16" x 5.5" carbon fiber propellers
● 10,000 mAh Lithium Polymer Batteries provide 15-35 min flight time for nominal operation
Controls
Pixhawk Flight Controller
► Built in IMU, GPS, and Telemetry
► Real-time parameter adjustability
► Open source development
► Previous VTOL application firmware
Servo Actuators
► Front Tilt-Rotor
► Yaw Motor Mount
► Elevon Flight Surfaces

Electrical Components




Flight Controller
The Pixhawk is an all-in-one flight controller capable of autonomous flight. The Pixhawk is targeted towards high-end research, making it possible to achieve uncommon designs.
Communication
For autonomous flight, the airframe will be communicating with the 3DR telemetry unit. For manual flight, a Spektrum DX8 transmitter will be used.
Electronic Speed Controllers
The Pixhawk is an all-in-one flight controller capable of autonomous flight, and is an essential product to include in the design. There exists a community of developers constantly adding and updating unique projects, in the form of open firmware. The Pixhawk is targeted towards high-end research, making it possible to achieve uncommon designs.