|
|
|
|
Tensile Fatigue Selection:
Several concepts were reviewed for the tensile loading mechanism. Listed below are the concepts, a brief explanation, and the reason for pursuing or not pursuing. All concepts reviewed were taken from ASTM E 466. Many concepts were determined not feasible early in analysis and thus no design matrix was created.
Hydraulic System: A single or dual action piston which moves the cross head up or down.
Reason for not pursuing: -Lower than desired cycle frequency capabilities for cost. -High maintenance.
Rotating Mass: An eccentrically rotated mass is used to produce a tensile load on a specimen.
Reason for not pursuing: -Extremely complex design. -Limited loading capabilities. -Applying bending load would have been extremely difficult.
Pneumatic solenoids: Utilizes compressed air to produce forces.
Reason for not pursuing: -Noise (machine would have been operated in school machine shop) would have been a nuisance. -Would not be able to control the shape of the load curve.
Magnetic solenoids: Use an electromagnetically inductive coil to move a metal slug in and out of the center of the coil.
Reason for not pursuing: -Solenoids available at desired load capabilities were out of price range. -Push rods in solenoids within price range had small diameter, leading to concerns about durability.
The following two methods were looked at more closely.
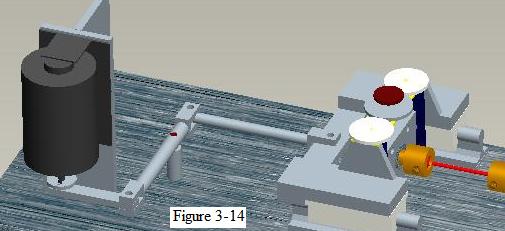
Mechanical System: Utilizes a motor driven system of lever arms to displace end of specimen.
Reasons for Pursuing: -Desired frequencies can be achieved. -Specimen can be forced back to original position. No need to wait for system to relax back to original position on its own. -Sinusoidal load curve can be produced for both tensile-only or fully reversed cycling.
Reason for not pursuing: -Tight tolerances would make fabrication difficult. -Load would be calculated via displacement.
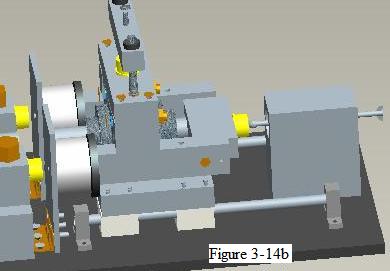
Electromagnets: Can push off against another magnet or attract a material with a high magnetic permeability.
Reasons for pursuing: -With appropriate electronics and configurations, could produce a wide range of load curves. -Off-the-shelf product -No moving parts.
Reasons for not pursuing: -Relatively low power within price range. -Must guard against overheating (especially for a long duration test). -Force decreases rapidly with distance. Therefore precise positioning is more important.
Decision: A mechanical system, similar to the one above, was initially pursued until it was determined that fabrication difficulties would not be overcome. Electromagnets were then chosen (Figure 3-14b), along with an on/off power cycler that produces a square wave for the load curve.
|
|
|