|
|
|
|
Design Modifications
Motor- The original motor selection for the rotating bending cycle had 1/2 horsepower and produced a maximum of 3600 rpm. The electric motor was single phase and operated off of a 120V power source. Once it was determined that the maximum cycle frequency for tensile loading would not exceed 30 Hz a new motor was selected. The final motor selection has 1/3 horsepower and operates at up to 1800 rpm. This corresponds to the 30 Hz produced in tensile loading.
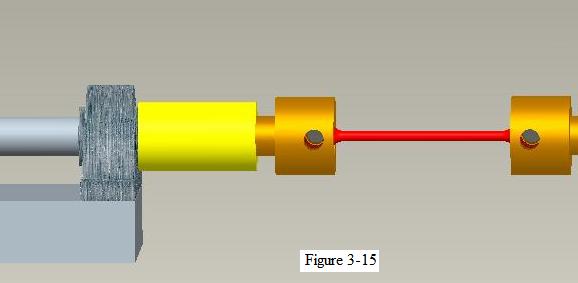
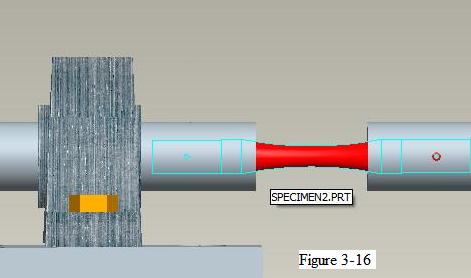
Left Grip- The initial left grip (Figure: 3-15) was designed to be a separate component from the main shaft and would have been attached to the main shaft using a rigid shaft coupling. The design was altered to incorporate the grip into the main shaft (Figure: 3-16) itself, thus eliminating the need for a separate left grip, the rigid coupling, and shortening the overall length of the fatigue tester.
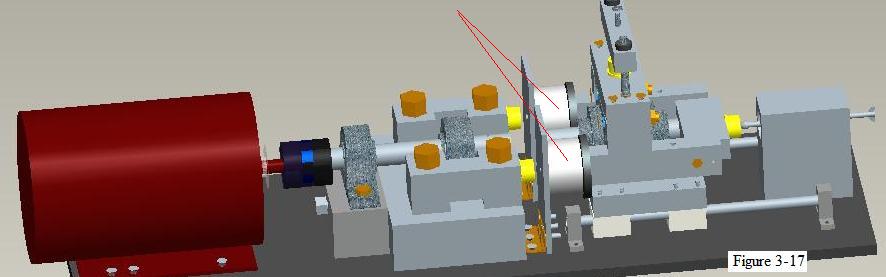
Electromagnet Tensile Loading Arrangement- Prior to initial assembly of the machine, the design called for two electromagnets (Figure 3-17) located on either side of the platform.
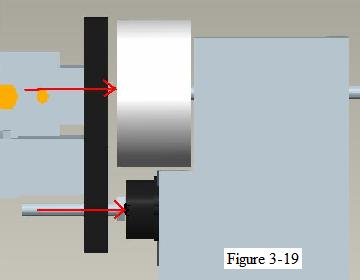
These electromagnets were intended to oppose two permanent magnets mounted on the platform and provide a repulsive, or pushing force. Based on an experiment with permanent magnets, it was expected that each electromagnet/permanent magnet pair would provide roughly 17 lbf, for a total of approximately 34 lbf of tensile loading. When testing this arrangement, it was discovered that the tensile loading delivered was negligible. It is speculated that this is due to a difference in magnetic field structure between the electromagnets and the permanent ceramic magnets. The design was changed to utilize the electromagnet’s holding force on a 1/2 inch steel plate (Figure 3-19) in black. The configuration was changed to placing an electromagnet behind the platform with a steel plate mounted on the back of the platform (Figure 3-18). In this position the electromagnet was able to attract the steel plate, thus applying a tensile load to the specimen. 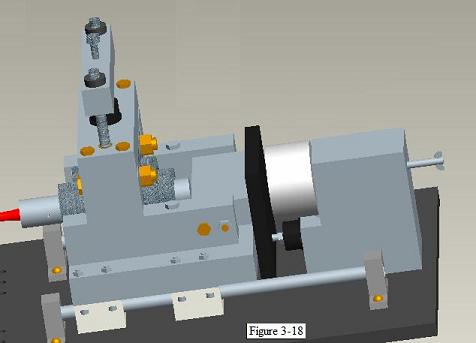
|
|
|