|
|
|
|
|
|
Solutions should be fully derived showing all intermediate results, using class procedures. Show all reasoning. Bare answers are absolutely not acceptable, because I will assume they come from your calculator (or the math handbook, sometimes,) instead of from you. You must state what result answers what part of the question if there is any ambiguity. Answer exactly what is asked; you do not get any credit for making up your own questions and answering those. Use the stated procedures. Give exact, cleaned-up, answers where possible.
One book of mathematical tables, such as Schaum’s Mathematical Handbook, may be used, as well as a calculator, and a handwritten letter-size formula sheet. Table 3.1 of the book is attached. In the Laplace transform question, everything not in Table 3.1 must be derived. The convolution theorem is an exception, but this theorem should only be used if absolutely unavoidable.
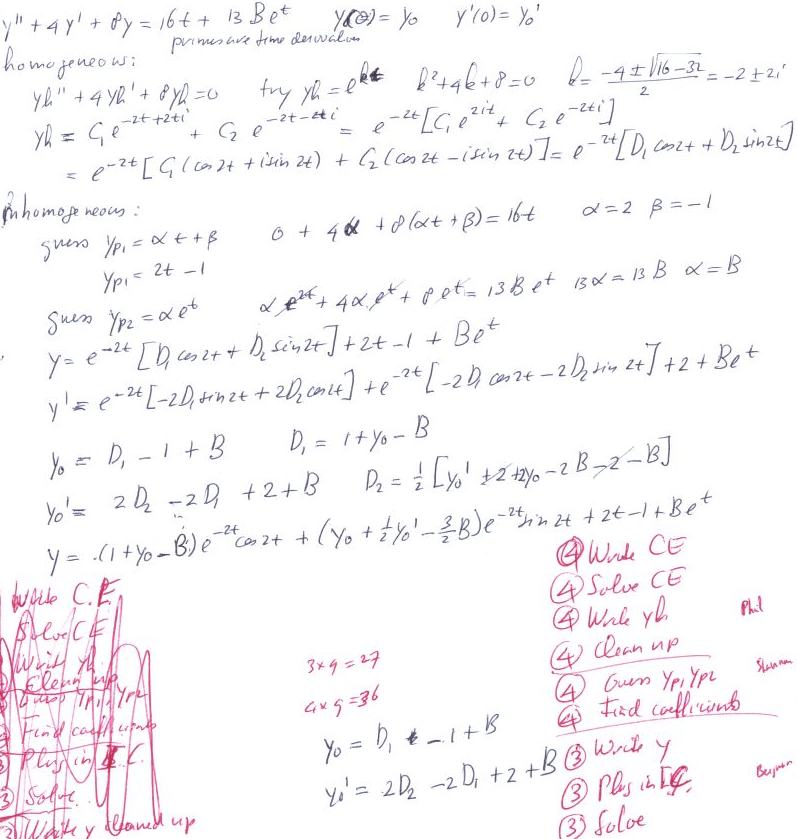
Question: Solve
Be sure to show where every intermediate result comes from.
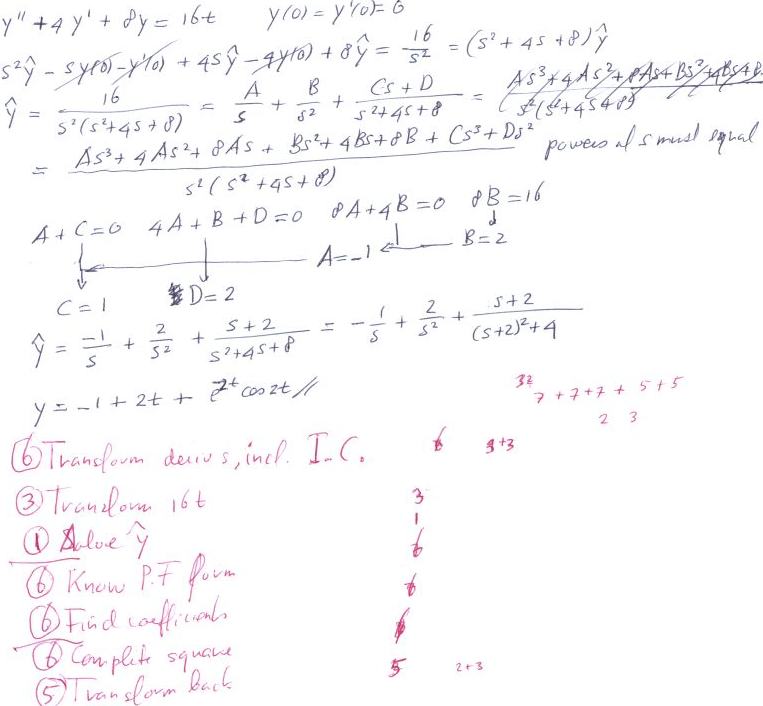
Question: Solve
You can only use the transforms in the supplied Table 3.1. Anything else must be derived.
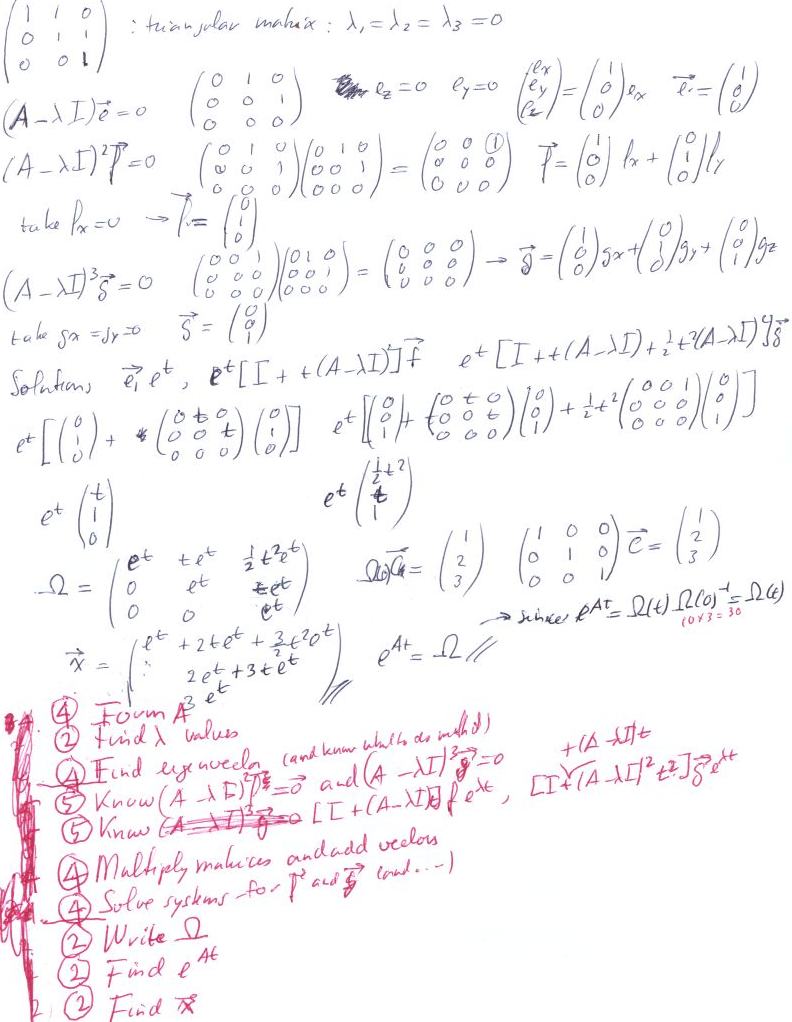
Question: Solve the first order system
Be sure to show where every intermediate result comes from.
{kind=link}
{kind=link}
{kind=link}